


Product Detail
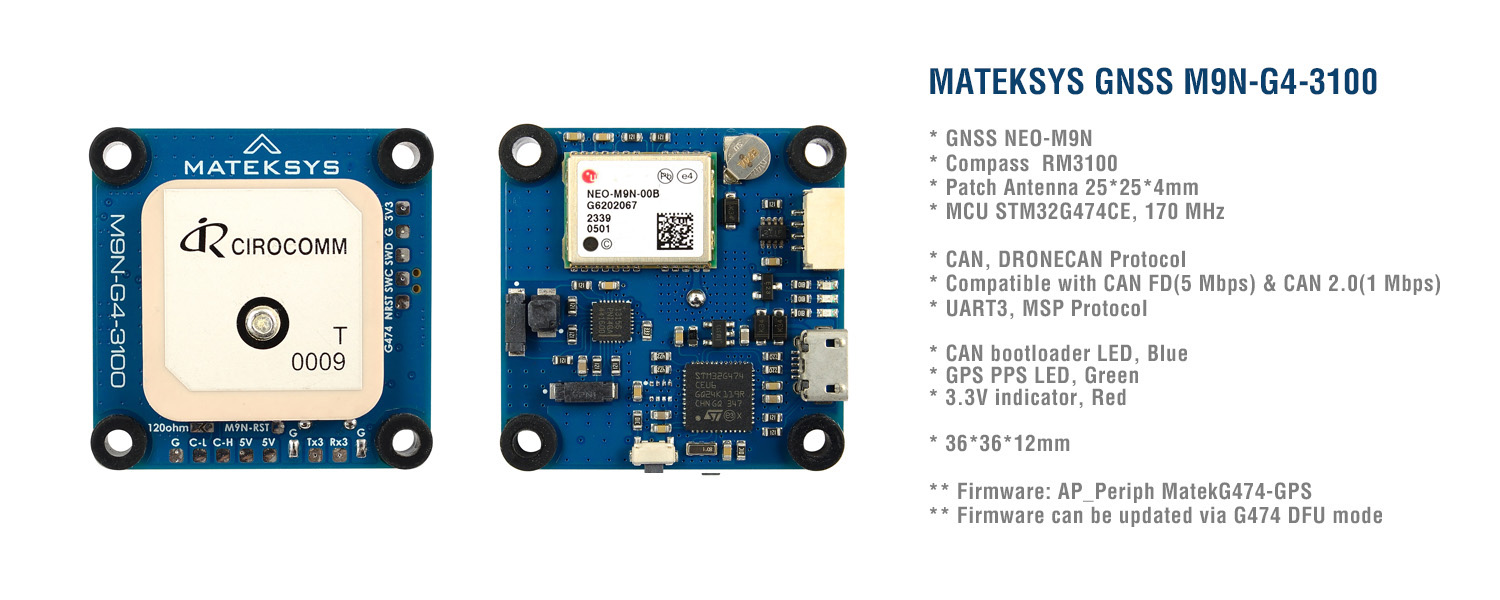
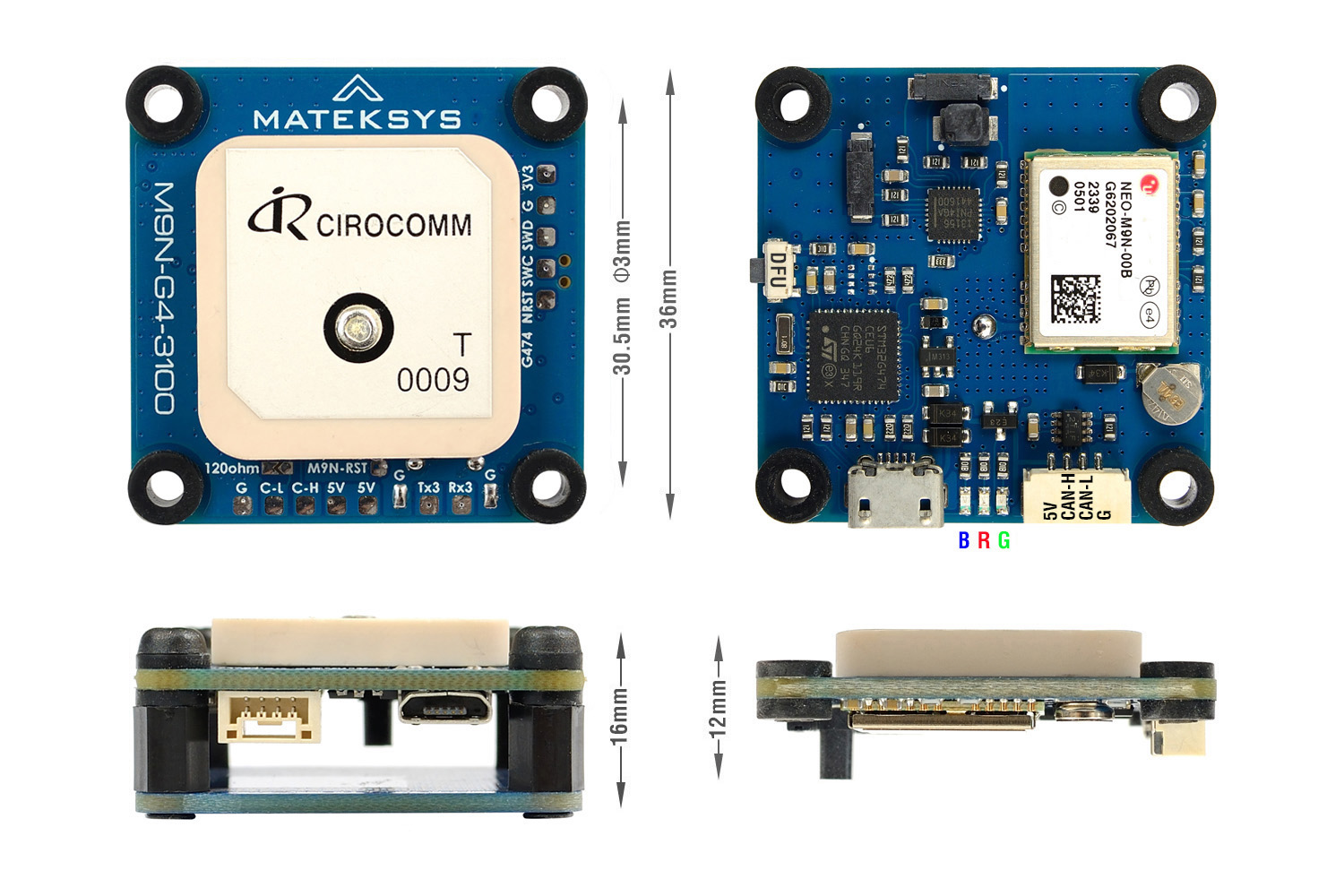
Product Parameter
CAN (UAVCAN protocol) Connection
- M9N-G4-3100 5V — FC 4V ~ 6V
- M9N-G4-3100 CAN-H — FC CAN High
- M9N-G4-3100 CAN-L — FC CAN Low
- M9N-G4-3100 G — FC G/GND
FC UAVCAN Parameters(ArduPilot)
- CAN_D1_PROTOCOL -> 1
- CAN_P1_DRIVER -> 1
- GPS_TYPE -> 9 (DroneCAN)
- COMPASS_TYPEMASK -> 0 (make sure DroneCAN Unchecked)
—————————————————————————————-
UART (MSP protocol) Connection
- M9N-G4-3100 5V — FC 4V ~ 6V
- M9N-G4-3100 TX3 — FC spare UART_RX
- M9N-G4-3100 G — FC G/GND
ArduPilot (since 4.1.x) FC Parameters
- Serialx_PROTOCOL = 32 (MSP) where x is the SERIAL port used for connection on autopilot.
- Serialx_BAUD = 115 where x is the SERIAL port used for connection on autopilot.
- GPS TYPE = 19 (MSP)
- COMPASS_TYPEMASK 0 (or make sure MSP bit is not checked)
INAV (since 2.6) FC Parameters
- M9N-G4-3100 is compatible with any flight controller supported by INAV over a spare UART.
- In ports tab, Enable MSP on corresponding UART that M9N-G4-3100 connected, DO NOT enable “GPS” on that UART. select Baudrate 115200.
- feature GPS
- set gps_provider = MSP
- set mag_hardware = MSP
- set align_mag = CW90, if compass is mounted flat with arrow facing forward, and flight controller arrow is facing forward also.